07. Segmento Terrestre
7.- Segmento terrestre
Veamos cómo está integrada la Estación terrena
7.2.- Componentes electrónicos
Lista detallada de componentes electrónicos, sensores y módulos que integran la estación terrena:
| Cantidad | Descripción | Número de parte / Modelo |
|---|---|---|
| 1 | Antena Yagi 896-980 MHz. | S/N |
| 1 | Arduino Pro Mini 3.3v. | S/N |
| 1 | Cable para antena conector N macho a SMA macho 36”. | S/N |
| 1 | PCB de Estación Terrena. | S/N |
| 2 | Diodos rectificadores | 1N4004 |
| 1 | Módulo de comunicacion LoRA | RFM95 |
| 1 | Conector SMA para antena | S/N |
| 1 | Modulo para programar arduino | FT232 |
| 1 | Tarjeta reguladora de voltaje | LM2596 |
| 6 | Cables hembra | S/N |
7.2.- Especificaciones y de los elementos electrónicos.
A continuación se detalla la información de cada uno de los elementos que conforman La estación terrena para la misión CatSat1
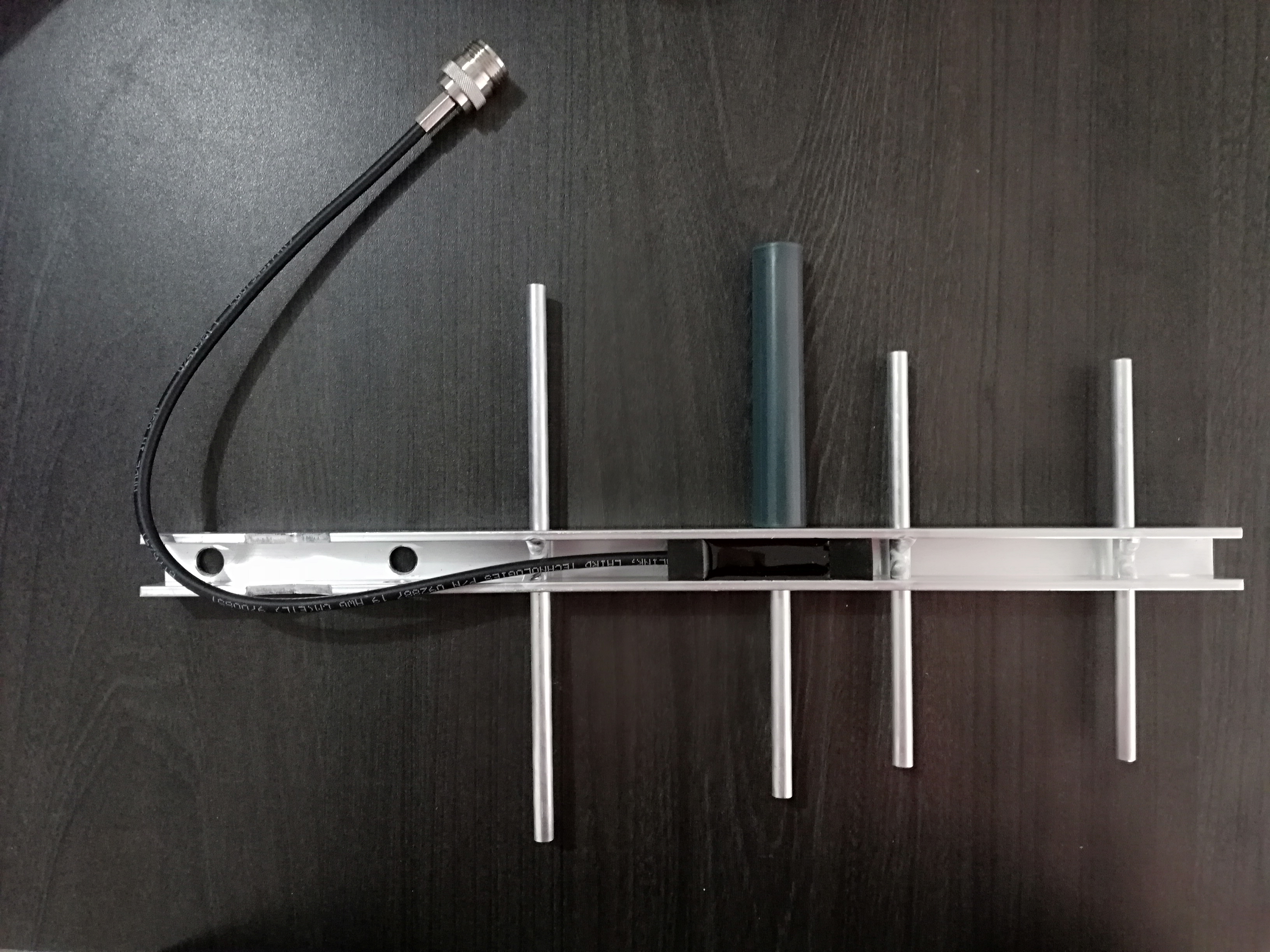
7.2.1.- Antena Yagi y cable.
La antena Yagi PC904 está diseñada para trabajar en un rango de frecuencias de 896 - 980 mhz, con una impedancia de 50 ohms, los 4 elementos que la componen le dan 8.2 dBm de ganancia, este tipo de antena es casi totalmente direccional con 20º de apertura, usa un conector N hembra.
Características:
- Ganancia de 8.2 dBm
- Impedancia de 50 Ohms
- 20º de apertura
DataSheet [17]
7.2.2.- Cable Estación Terrena
El cable de conexión antena - Estación terrena consta de un conector N macho y un SMA macho conectados por un cable coaxial de 50 ohms de impedancia.
Características:
- Largo: 36”
- Impedancia de 50 Ohms
- Conector N a SMA

7.2.3.- Módulo Convertidor DC-DC Buck LM2596
Este módulo convertidor DC-DC Step Down permite una alimentación externa para la estación terrena de hasta 35V 2A. Esto proporciona una mayor corriente por si en alguna ocasión es necesario transmitir al CaTSat.
Características:
- Voltaje Entrada: 4.5- 35V (ajustable)
- Voltaje Salida: 1.5- 35V
- Corriente de Salida: 2A, Máximo 3A (Disipador adicional requerido)

DataSheet [18]
7.3.- Diagramas de la PCB de la estación terrena
La estación terrena está diseñada de tal manera para que puedas tenerla junto a tu computadora y conectar de manera sencilla los componentes necesarios para la comunicación, además cuenta con un convertidor DC-DC que permite conectar una fuente externa para proporcionar suficiente corriente en caso de que quieras transmitir datos al satélite, en esta sección encontrarás los diagramas de las conexiones internas que te ayudarán a comprender de una mejor manera su funcionamiento.
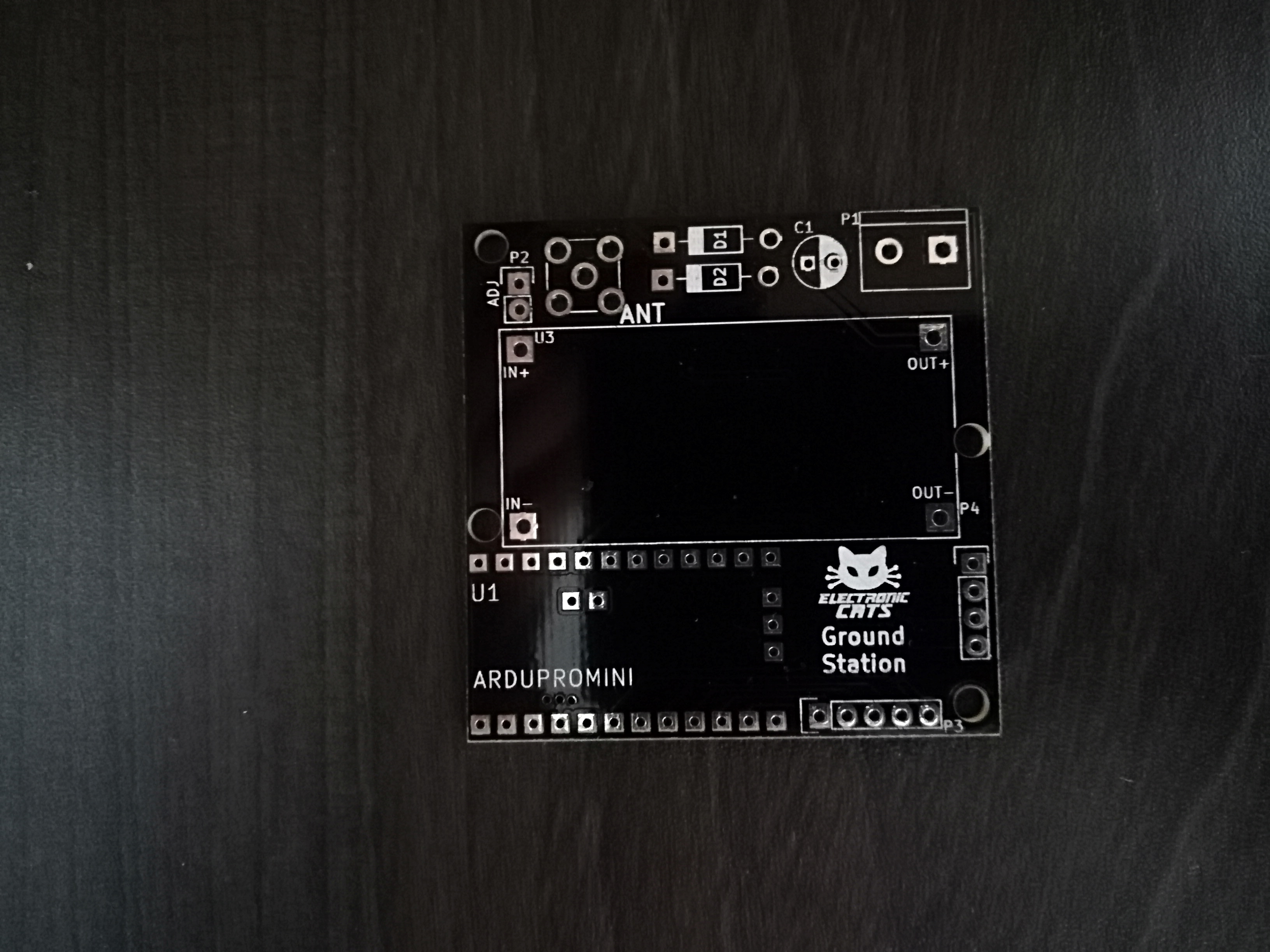
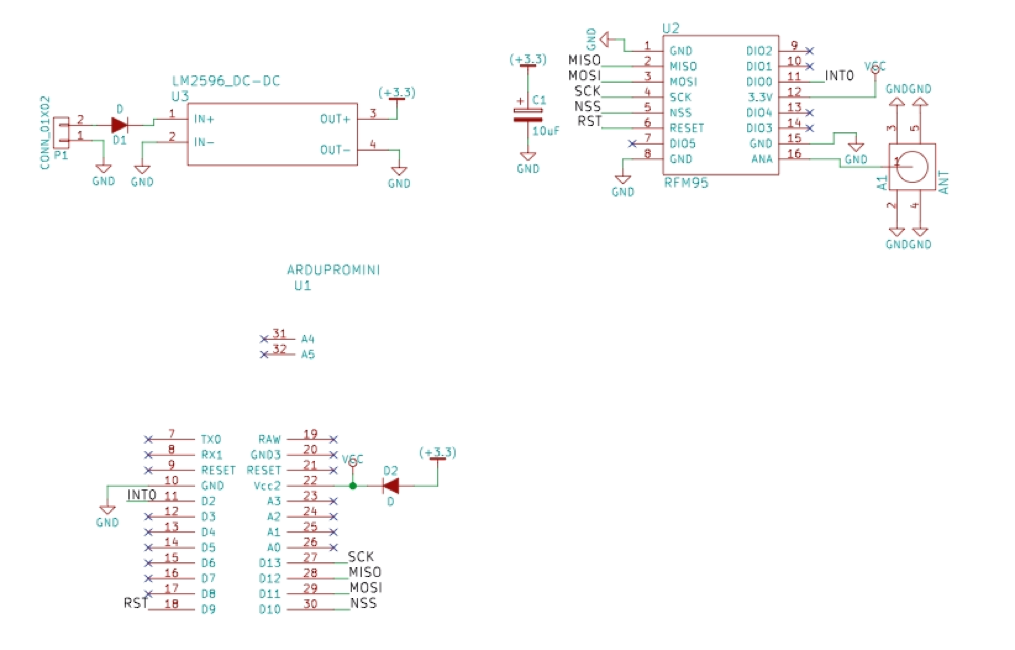 Figura 10: Esquemático estación terrena
Figura 10: Esquemático estación terrena
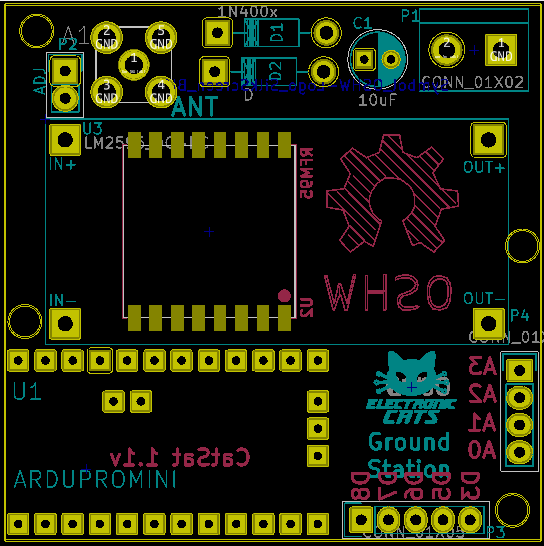 Figura 11: Earth Station Board
Figura 11: Earth Station Board
7.4.- Programa de control
El código fuente del programa de control para la estación terrena también se encuentra disponible en GitHub,el cual, tiene como objetivo configuracion basica y la puesta en marcha del sistema, podrás modificar dicho código si así se requiere dependiendo las características de la misión. A continuación se muestra el diagrama de flujo del código de la estación terrena:
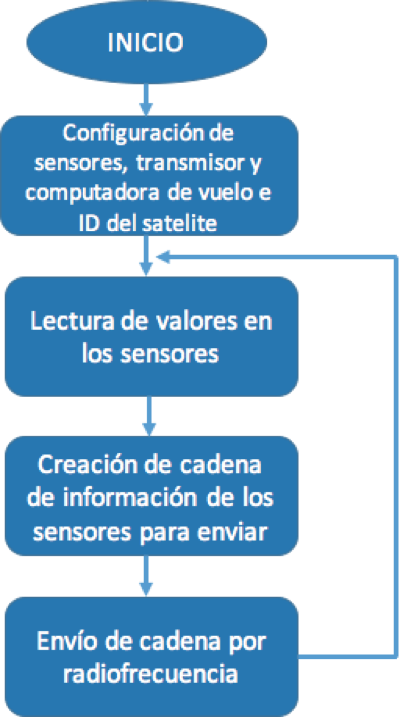 Figura 12: Diagrama de flujo
Figura 12: Diagrama de flujo
7.5.- Metodología de ensamblado
Una vez armado el CatSat las piezas que tendras seran unicamente las de la estación terrena, por tanto no tendremos que separar, más es recomendable confirmar que tenemos todas las piezas, las cuales son:
- 1 x Arduino Mini Pro
- 1 x Módulo RFM95
- 1 x DC-DC Buck LM2596
- 2 x Diodos
- 1 x Conector hembra SMA
- 1 x Capacitor 10uF (Electrolitico)
- 1 x Conector tornillo
7.6.- Metodología de soldado
Aunque el orden de soldado de los componentes no afecta la funcionalidad del dispositivo, te recomendamos soldarlos según el orden de la siguiente lista, ya que los hemos ordenado por orden de complejidad y de esta manera completar más fácilmente todo en la placa.
- Diodos (D1, D2)
- Capacitor ( C1 )
- Conector tornillo ( P1 )
- Conector hembra SMA ( ANT )
- Módulo RFM95 ( U2 )
- Arduino Mini Pro ( U1 )
- DC-DC buck LM2596 ( U3 )
7.7.- Conexión de la estación terrena
Una vez ensamblada, solo es necesario conectar el FTDI a tu computadora en un puerto USB para establecer la conexión “Serial” y de esta manera transferir los datos recibidos al software que funcionará como tablero de control y despliegue de los datos de la misión.